
Michigan Scientific Corporation Hjulpulstransducer (WPT) er et kompakt indkodersystem, der er designet til at fastgøres til hjulet på et køretøj. Encoder-signaler fra WPT kan bruges til at beregne rotationshastighed, vinkelpositionen og et hjuls rotationsretning. Disse målinger bruges almindeligvis til at spore et køretøjs position til applikationer såsom udvikling af elektriske køretøjer og sporing af autonome køretøjer.
Autonom sporing af køretøjer
Autonome køretøjer er afhængige af Global Navigation Satellite System (GNSS) teknologi til at spore deres position, men disse systemer kan fejle i bymæssige, indendørs eller underjordiske miljøer. I områder, hvor GNSS-sporing ikke er tilgængelig, skal andre teknologier såsom hjulpulstransducere eller accelerometre bruges til at spore køretøjers placering. WPT-systemer kan bruges til at spore positionen af autonome gaffeltrucks inde i varehuse eller autonomt underjordisk mineudstyr. Derudover kan WPT-systemet bruges til at teste og validere nøjagtigheden af accelerometer-baserede systemer.
WPT-sensorbeskrivelse
Samlingen er designet til monteres hurtigt og nemt på et køretøjshjul. Dens kompakte og lette design består af elektronik i et robust hus. WPT'en monteres på hjulet via Quick Connect spændemøtrikker eller forlængede møtrikker. Adapterpladerne og Quick Connect Lug Nut Collets kommer i en række forskellige størrelser og konfigurationer for at opfylde enhver standard hjuldimension. EN Magnetisk køretøjsstatorfastholdelse og fastholdelsesstang bruges til at holde indkodermodulstatoren på plads, mens sensoren bruges på køretøjet. På grund af køretøjstestens karakter er WPT designet til at være meget robust. Med roterende tætninger til en IP67-klassificering er WPT ideel til test i regnfulde, snedækkede eller snavsede omgivelser.
monteres hurtigt og nemt på et køretøjshjul. Dens kompakte og lette design består af elektronik i et robust hus. WPT'en monteres på hjulet via Quick Connect spændemøtrikker eller forlængede møtrikker. Adapterpladerne og Quick Connect Lug Nut Collets kommer i en række forskellige størrelser og konfigurationer for at opfylde enhver standard hjuldimension. EN Magnetisk køretøjsstatorfastholdelse og fastholdelsesstang bruges til at holde indkodermodulstatoren på plads, mens sensoren bruges på køretøjet. På grund af køretøjstestens karakter er WPT designet til at være meget robust. Med roterende tætninger til en IP67-klassificering er WPT ideel til test i regnfulde, snedækkede eller snavsede omgivelser.
Encoder Signal Conditioners
WPT optiske encoder-opløsninger på op til 5,000 pulser pr. omdrejning (ppr) er tilgængelige. Standardopløsninger inkluderer 360 ppr, 512 ppr, 1024 ppr og 5,000 ppr. Yderligere beslutninger er tilgængelige efter anmodning. Alle encodervalg har fire standard encoderudgange: A, B, I og A⊕B. Udgange A og B er i kvadratur, hvilket betyder, at de er 90 grader ude af fase. Output A⊕B er den eksklusive ELLER af de to kanaler, hvilket fordobler standardopløsningen for encoderen. Udgangene, 0 til 5 digitale volt-impulser, kan drive TTL-belastninger.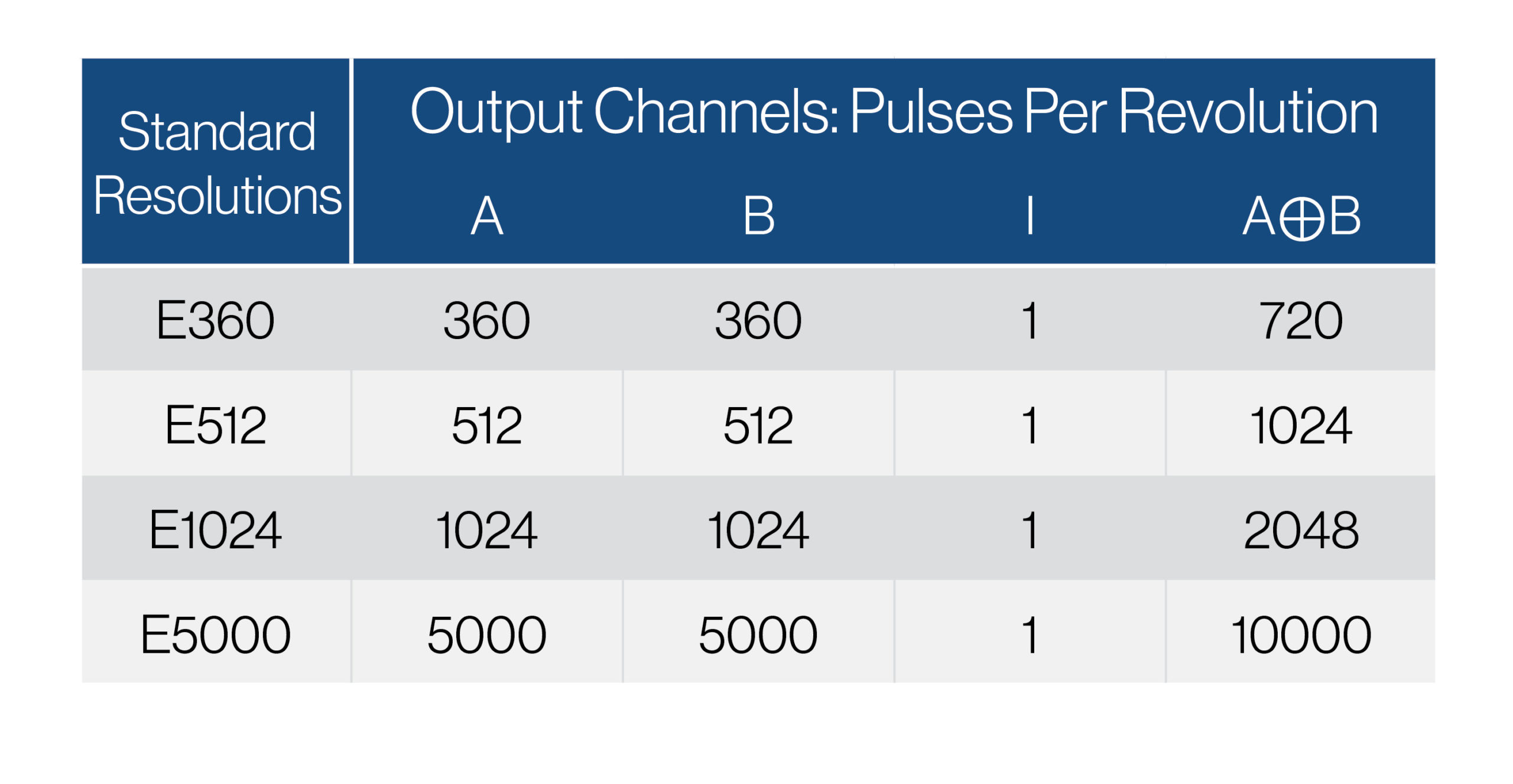
Michigan Scientific EC-LV Encoder Signal Conditioner konverterer 0 til 5 digitale volt-impulser fra WPT-sensorencoderen til lineære spændinger, der er proportionale med vinkelposition og vinkelhastighed. EC-LV kan tilføjes in-line med statorkablet og kræver ikke yderligere programmering. De eksterne kontakter giver brugeren mulighed for at vælge hastighedsområdet og rotationsretningen.
Hvis du er interesseret i at lære mere om, hvordan hjulpulstransduceren kan bruges til din applikation, bedes du venligst kontakte en Michigan Scientific-repræsentant i dag.